


项目分享| 自制桌面级Q版机器人
这个名为Tillu的桌面机器人有如下功能:
向任何方向移动:向前、向后、左转、右转。
用不同的面部表情表达情感。
表演 10+ 独特的舞步。
通过先进的语音识别系统响应语音命令。
-
这是一个非常富有表现力的小小机器人,内置屏幕上可以显示各种面部表情,栩栩如生。 这个名为Tillu的桌面机器人有如下功能: - 向任何方向移动:向前、向后、左转、右转。
- 用不同的面部表情表达情感。
- 表演 10+ 独特的舞步。
- 通过先进的语音识别系统响应语音命令。
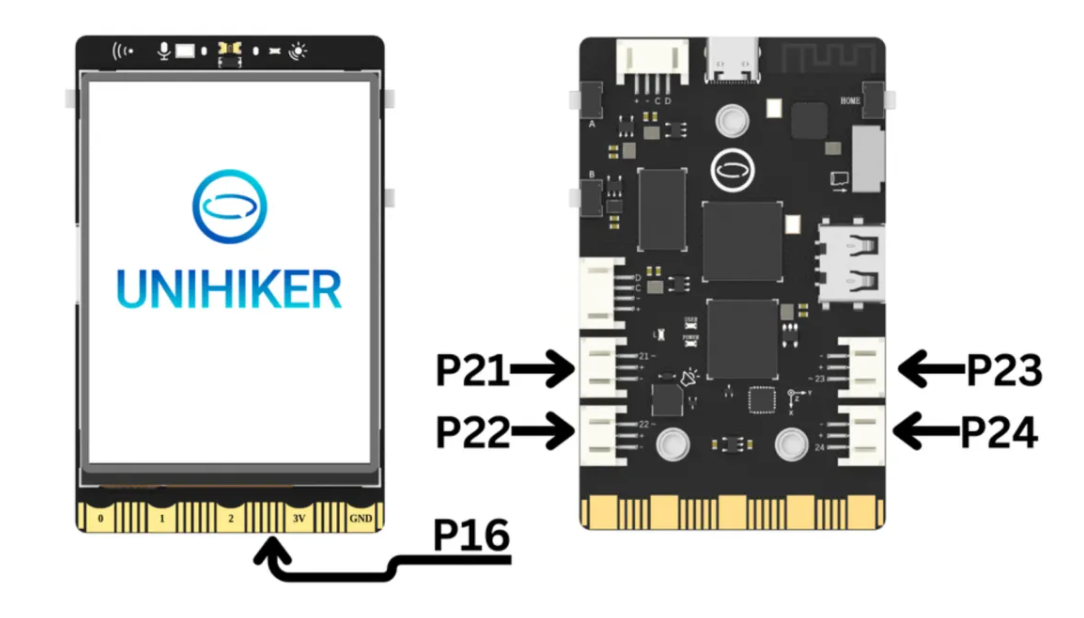
主要的器件包括: - UNIHIKER单板电脑
- 4个舵机
- 语音识别的麦克风
- 平衡和定向的 6 轴陀螺仪
- 基于声音的交互的蜂鸣器
- type-c拓展
- 电池管理
- 一个增添了额外魅力的显示屏
具体的设计步骤如下:
步骤1:CAD和3D打印
为了让 Tillu 栩栩如生,首先在 Fusion 360(一款多功能 CAD 软件)中设计了机器人。
首先,导入所有标准组件,如 UNIHIKER、伺服电机和手动测量的尺寸,以创建电池管理器板。
机器人本体设计:
1)外壳(头部):安全地容纳沉重的电池和 UNIHIKER。
2)主体(中心框架):作为结构支柱,在保证稳定性的同时连接头部和腿部。
3)Cover Panel:增强机器人的美感。
4)腿部和脚部:灵感来自 Otto DIY 机器人,可实现流畅的运动和平衡。
5)耳机设计: 添加有趣、酷炫的外观,赋予 Tillu 额外的个性!
6)拧紧机构: 该设计包含一个拧紧机构,便于组装。
7)外壳背面设有电源按钮插槽和两个 USB Type-C 端口——一个用于电池充电,另一个用于对 UNIHIKER 进行编程。
文末原文链接中,有可以在 Fusion 360 中打开模型,以及可以直接下载用于 3D 打印的 STL 文件。
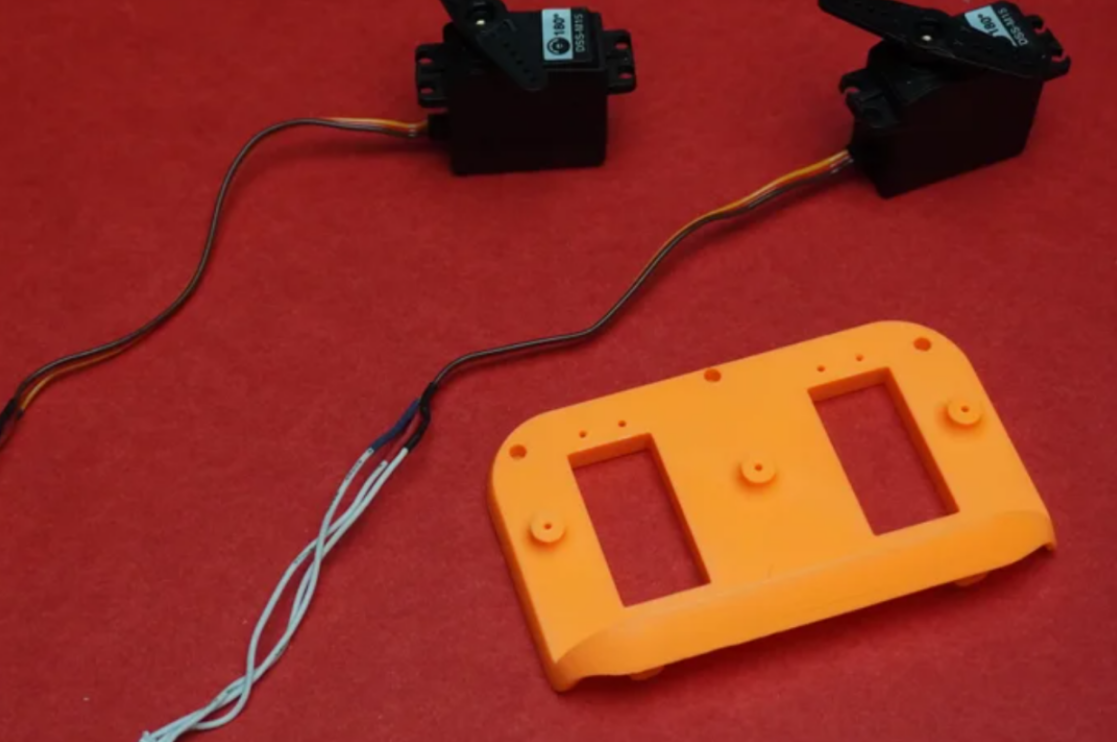
设计完外壳之后,就是使用3D打印机打印。部件设计为多块打印,以最大限度地减少 3D 打印过程中不需要的支撑。
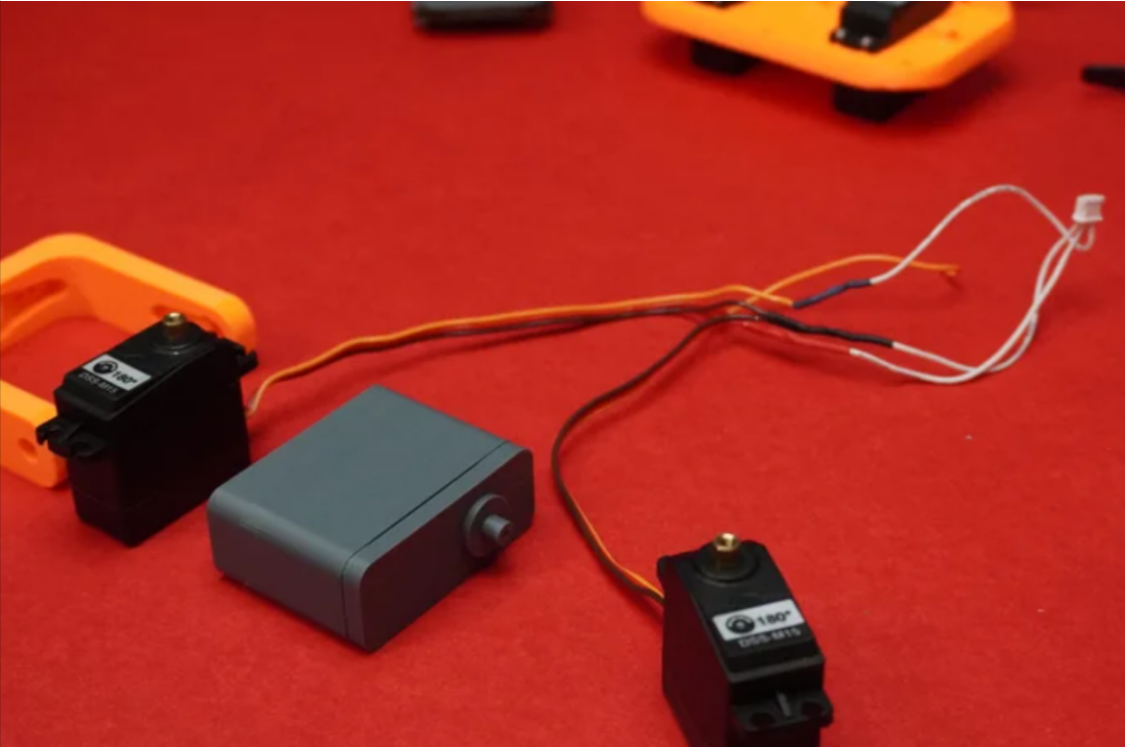
步骤二:为伺服电机添加连接器
伺服电机的连接线与 Unihiker 的连接器引脚不兼容。因此,进行需要修改。 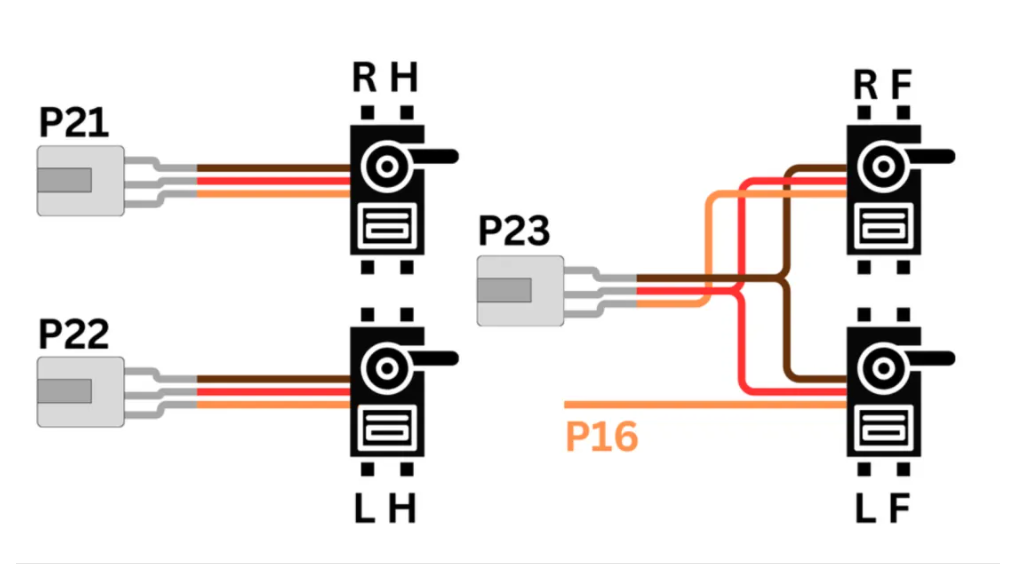
Unihiker 板有三个带 PWM 信号的 GPIO 连接器(P21、P22 和 P23),但需要连接四个伺服电机。要解决此问题,方法是将为前三个电机使用可用的 GPIO 引脚。第四个电机的信号引脚将直接焊接到板上的 P16 上。 步骤三:扩展按钮以开/关电源

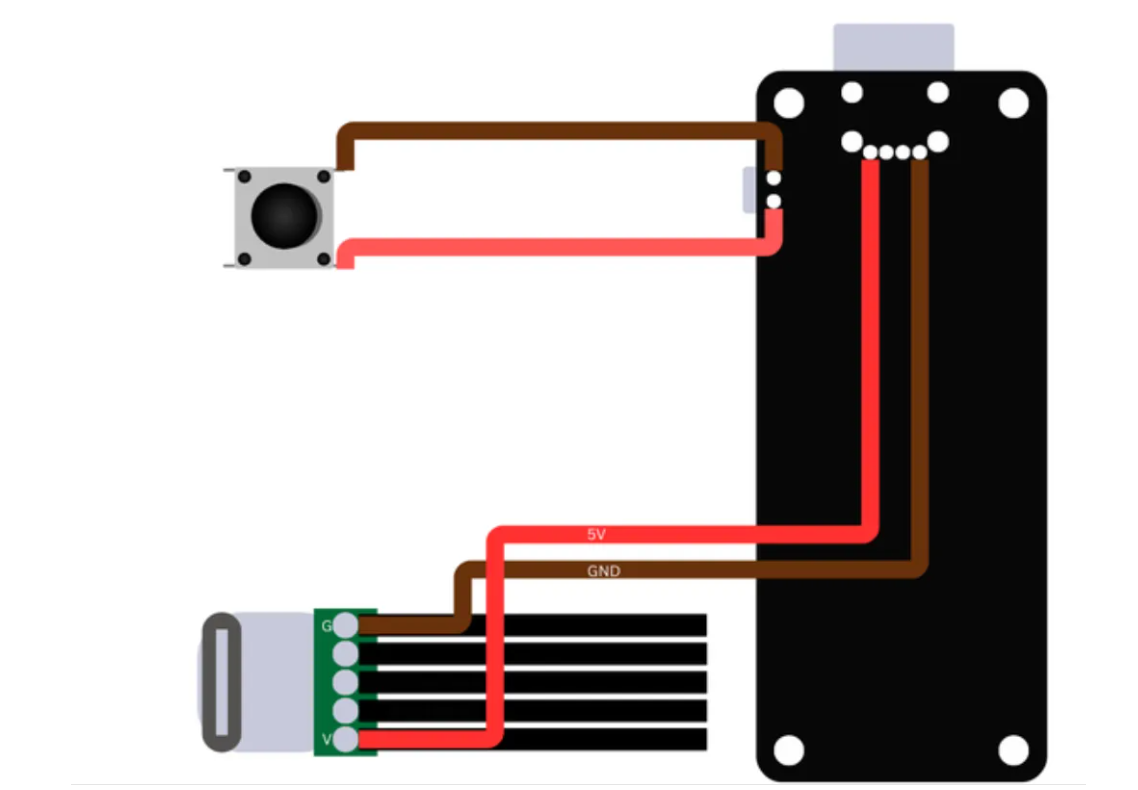
电池管理板包括一个小按钮,用来打开和关闭机器人电源。但是,由于外壳设计,该按钮无法访问,并且对于实际使用来说太小了。为了解决这个问题,将通过添加外部触觉按钮来扩展功能。 1)识别电池管理板上的微型内置按钮。
2)注意其连接点 (两个端子)。
3)将两根电线连接到按钮端子。确保电线长度足够。
4)将电线的自由端从外部按钮焊接到与连接图相同的端子上。
步骤四:连接电池,添加Touch Sensor
将使用电池管理板给 Unihiker 板供电,并确保通过相同的 USB Type-C 连接器进行编程。通过创建自定义扩展连接器,将允许同时从电池组供电并访问 Unihiker 的 USB Type-C 端口进行编程。焊接如下:

步骤五:编程和测试
设置连接,如上图所示,连接所有伺服器和触摸传感器以及Type-C电池组,暂时不要焊接第 4 个伺服的明线。
从 https://mindplus.cc/en.html 下载并安装 Mind+ 软件。安装后启动软件。
使用 USB 数据线将 Unihiker 连接到 PC。在 Mind+ 中,单击位于左下角的 “Extensions”。从列表中选择“Unihiker”,然后单击“返回”返回主菜单。
启用代码模式:在 Mind+ 中,点击 “Code” 切换到编码界面。通过为 Unihiker 选择正确的 COM 端口连接到远程终端。连接后,应该会在右侧看到 Unihiker 的文件系统。
上传代码:
- 从 Tillu GitHub 存储库下载提供的文件夹。
- 解压缩下载的文件以访问 Tillu 文件夹。
- 将整个 Tillu 文件夹拖放到 Unihiker 的文件系统中。这会将所有必要的文件和模块上传到 Unihiker。
运行测试程序:打开位于 Tillu 文件夹中的 forward.py 文件并运行该程序。
使用电池组测试:
- 从 PC 上拔下 Unihiker。
- 打开电池模块。Unihiker 应该开机。
- 使用 Unihiker 上的导航按钮在根文件夹中找到 forward.py 文件。
- 直接在 Unihiker 上选择并运行该程序。
- 伺服系统应响应,触摸传感器应注册输入。
步骤六:组装 将主控板、电池、舵机、外壳等,一一组装。 

More
最终安装之后的成品: 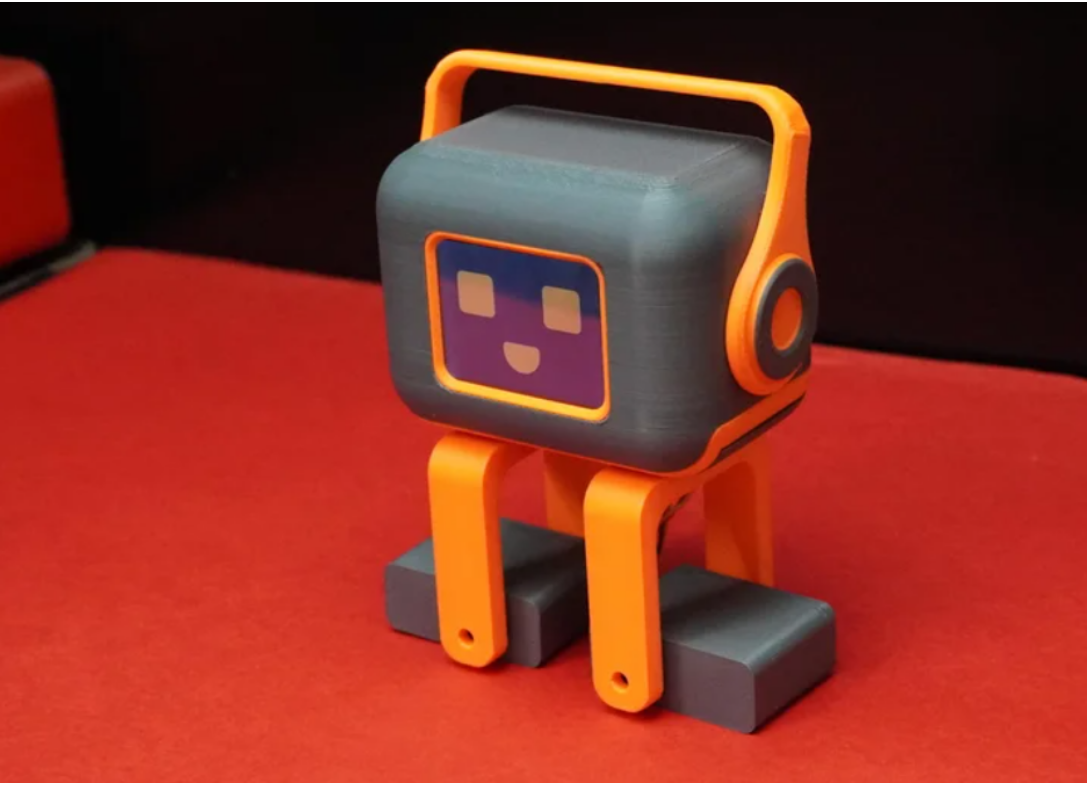
如果感兴趣的话,可以在阅读原文查看代码部分的解释。 原文链接:
https://www.instructables.com/Tillu-the-Robot/
github:
https://github.com/MukeshSankhla/Tillu
版权所属:Mukesh_Sankhla
-


















