


毕业设计| STM32宠物自动喂食装置,保姆级教程
-
以下毕设由番杰(B站ID:番杰阿)设计的一款宠物自动喂食装置。本文非常详细的描述了设计过程、硬件以及主要软件代码的讲解、物联网平台的使用等内容。感兴趣的同学可以自行设计,相信你们一定可以做的出来,如果有遇到问题,可以到番杰B站或csdn博客进行交流。
本装置使用STM32作为主MCU,通过ESP8266模块连接TLINK物联网平台,通过TLINK平台的手机APP查看宠物喂食的状态,并可以通过手机发送指令控制STM32输出PWM波控制舵机旋转,实现宠物食物的投喂,同时也可以通过指令实现自动、定时、定量地喂养宠物。建模模拟效果如下:
整体功能分享
在进行设计之前,需要确定一下本设计要实现的功能,然后再进行设计。在本设计中使用TLINK物联网平台通过ESP8266与STM32进行数据交互,STM32作为主控制MCU去控制舵机旋转,可以使宠物的食物顺利掉出。整体的功能流程如图所示。

TLINK部分:作为物联网平台,可以通过ESP8266WIFI模块与STM32进行数据交互,可以通过手机APP发送喂食指令,实现远程投喂的功能。
STM32的串口部分:主要功能是通过ESP8266与TLINK平台进行数据交互,接收TLINK发来指令信息。
STM32的定时器部分:主要功能是通过库函数输出PWM波,从而控制舵机旋转,以使宠物的食物顺利掉出。
器件选型
✔ ESP8266 WIFI模块
ESP8266是WiFi串口模块,通过串口与Stm32相连接,可以实现的功能就是:从串口接收Stm32发送的数据,WiFi输出该数据;从WiFi接收到数据,通过串口将该数据发送给Stm32。ESP8266有三模式:AP模式、STA模式、AP+STA模式。实物如图所示:

1.STA模式:该模式下ESP8266作为一个连接的设备,可以用过AT指令设置它所要连接的WiFi名字、密码,即可连接到无线网络上。
2.AP模式:该模式下ESP8266作为一个WIFI热点,可以通过AT指令设置其的WiFi名字、密码以及其他参数。像手机、平板电脑等其他的设备可以用过WiFi名字及密码连接上ESP8266。
3.AP+STA模式:该模式下ESP8266既可以作为一个WIFI热点,也可以作为一个连接的设备。
本次设计中ESP8266选择STA模式,仅作为STM32与TLINK平台的数据交互的媒介,供电电压为3.3v。所以只使用到四个引脚:RX引脚、TX引脚、3V3引脚、GND引脚。
✔ STM32F103ZET6
本次设计中使用STM32F103ZET6最小系统板作为核心MCU。

STM32部分主要使用串口跟定时器,来实现使用串口通过ESP8266 WIFI模块与TLINK平台进行数据交互、通过定时器输出PWM波控制舵机旋转,以实现宠物食物掉落的目的。
只强调一下,其引脚3.3V-5V耐压,过高的电压会烧掉其中的芯片。还有在本次设计中所用到的引脚:PB1、PB2、P31、PA2、PC6五个功能引脚,以及5V、GND供电引脚。
✔ CLS150TD舵机
舵机选用达盛舵机科技有限公司生产的CLS150TD型号的舵机,运行温度在-15℃~70℃,工作电压范围为4.8v-6.8v,驱动方式为PWM波,脉冲范围为500~2500 μsec,控制角度为:360°。
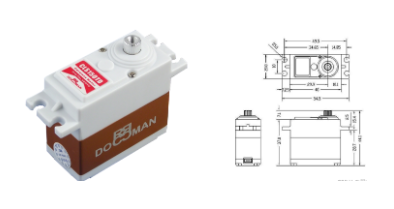
工作原理:通过给舵机的信号线(橙黄色)输入周期为20ms的PWM波,通高电平时间:0.5-2.5ms可以使舵机旋转0~360°。如图所示。

✔ 压力传感器
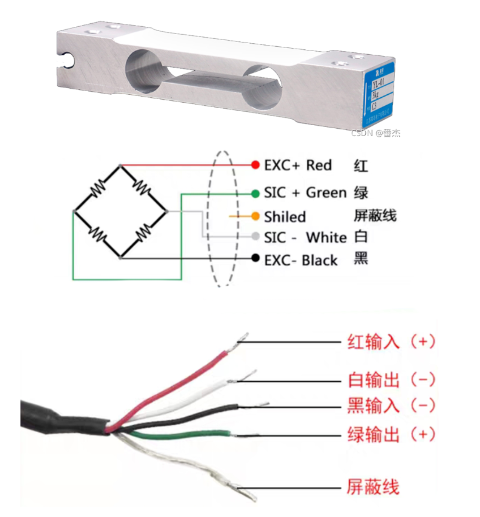
压力传感器选用电阻应变式压力传感器,以电阻应变计为转换元件,由弹性敏感元件、电阻应变计、补偿电阻和外壳组成,弹性敏感元件受到所测量的力而产生变形,并使附着其上的电阻应变计一起变形。电阻应变计再将变形转换为电阻值的变化,从而可以测量压力的变化,再通过A/D转换模块,即可得到被测物体的重量。所需接线的引脚为:EXC+、EXC-、SIC+、SIC-。实物图、引脚如图所示。
✔ HX711 A/D模块
A/D模块选用HX711芯片,主要实现将压力传感器检测到的电压信号转换成STM32可读的数字信号。所需连接的引脚:AVDD引脚、GND引脚、INA+引脚、INA-引脚、DT引脚、SCK引脚、VCC引脚。HX711模块实物图如图所示。

✔ 供电及稳压
供电使用3S锂电池作为整体装置的供电,3S锂电池可以提供11.1v的电压。3S锂电池实物如图所示。

因为HX711模块、舵机、STM32都不能直接11.1v电压,所以需要对电压进行稳压到5v,才能给它们供电,使用稳压板进行稳压,稳压板选用基于LM2596芯片的 DC-DC稳压模块,稳压板的输入端连接3S锂电池,用电压表测量输出端电压,用螺丝刀旋转稳压板上的变阻器,直到输出端输出电压为5v即可。而ESP8266则需要3.3v供电,所以需要再加一个稳压板将5v电压降到3.3v即可。稳压板实物如图所示。

✔ 硬件连接
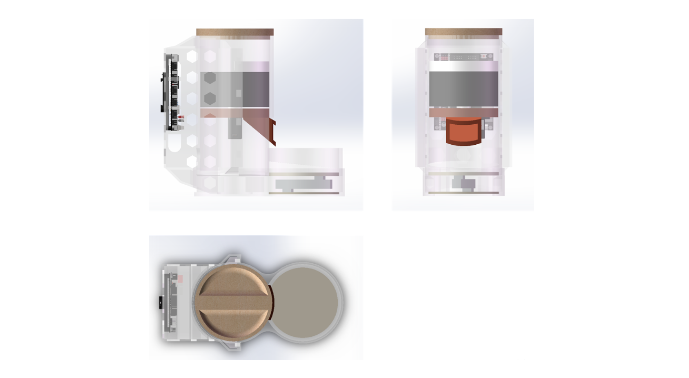
硬件连接部分使用杜邦线连接,连接如下:3S锂电池接稳压板1的输入端,稳压板1的输出端接STM32的5V和GND引脚、舵机的正(红色)负(棕色)极、HX711模块的VCC与GND引脚以及稳压板2的输入端。HX711的DT引脚接STM32的PB1引脚、SCK引脚接STM32的PB0引脚,STM32的PC6引脚(定时器3通道1)接舵机的信号线(橙黄色)、PA2引脚接ESP8266的RX引脚、PA3接ESP8266的TX引脚。稳压板2的输出端接ESP8266的3.3V和GND引脚。接线示意图、Solidworks建模图如图所示。

TLINK配置及软件实现
本部分主要介绍TLINK物联网平台配置以及STM32部分的软件编程,在TLINK官方网站进行平台的配置,实现数据的数据实时监测功能、定时发送指令、自动报警功能。STM32部分主要实现功能:使用串口连接ESP8266与TLINK平台进行数据交互、通过定时器输出PWM波、以及实现控制舵机旋转追踪的目的。
✔ TLINK物联网平台
本部分主要是进行TLINK平台的配置,在建立好一个设备与STM32进行数据交互。并介绍TLINK平台所要实现的功能:数据实时监测功能、定时发送指令、自动报警功能。
1)TLINK配置
首先简单叙述一下在TLINK平台新建一个新设备的流程,然后再具体的去介绍每一步的如何操作,添加设备的流程一般如下:先点击添加设备,然后在添加设备的页面设置分组、设置设备名称、选择链接协议、设置掉线延时、添加传感器配置完这些参数后,点击保存,一个新的设备就添加完成了,但是想要使用这个新的设备还需要进行传输协议的选择和定义,点击设置连接,在其中选择想要的传输协议与定义协议格式即可。流程图如图所示。


设备分组:可以在其中选择新设备的分组,方便以后更加快捷和方便的查看设备组。
设备名称:填写新设备的名称。
链接协议:可以在其中选择所要用到的传输协议,例如:MQTT协议、TCP协议、HTTP协议等等。在这里我选用TCP协议作为与ESP8266的传输协议进行数据的交互。
掉线延时时间:是指在多少时间范围内未接收到数据的传递,则显示设备下线,进行等待。
传感器:此部分可以设置和添加传感器,传感器有很多的类型可供选择,例如:数值型、开关型、图片型等等。在此设备中,我添加了三个传感器:食物剩余量(数值型)、投喂食物量(数值型)、开始投喂(开关型)。

在设置连接页面中,可以在此进行传输协议的选择和自定义协议格式。如图所示,我选择的是使用TCP协议进行数据传输,同时将传输协议定义为:
[H:ZLJ] [S::] [D?] [S:;] [D?] [S:;] [D?][S:;] [T:#]
其中[H:]表示数据头标签,[H:ZLJ]则表传输的数据以ZLJ开始。
[S:]表示分隔符标签,[S::]、[S:;]则表示使用“:”、“;”分隔数据。
[D?]表示数据标签,表示需要赋值给传感器的数据,在这个协议中的三个[D?]依次代表赋值给食物剩余量、投喂食物量、开始喂食三个传感器。
[T:]表示结束符标签,[T:#]则表示传输的数据以“#”结束。
例如,通过STM32给TLINK平台发送ZLJ:120;100;0;#,则表示为当前食物的剩余量为120克,投喂食物量为100克,开始喂食为OFF。
2)数据实时监测功能
可以通过手机或是电脑实时观战接收到的数据,并会可以自动的生成折线图,可以更加直观的观察食物的剩余量。同时可以电脑端给MCU发送数据以及操作指令使其完成相应的动作。手机APP远程查看如图所示。

3)定时发送指令
可以通过TLINK平台设置定时向MCU发送指令或是数据,使其做出相应的动作。这样就可以通过定时使喂食装置每天按时投喂,避免忘记。我这里设置为每天中午的12点,TLINK平台会给STM32发送一个“FEED_ON”,当STM32接收到数据时,进入串口中断,输出PWM波,控制舵机旋转,使食物可以掉落到碗中,以实现定时喂食的功能。如图所示。

4)自动报警功能
TLINK平台支持报警设置,可以自己设定剩余的食物低于某个值时,进行微信或是短信提醒。同时也可以设置自动进行相应的动作,例如,可以设置当剩余的食物量小于20克时,微信和短信报警提醒并进行投食动作。如图所示。


✔ STM32部分软件功能的实现
1)整体逻辑分析
首先对STM32部分实现功能的整体逻辑进行分析,首先进行系统时钟的初始化,确保STM32的时钟周期正常运行。其次进行串口2的初始化,确保串口2可以正常的接收数据。然后进行HX711模块的初始化,确保HX711模块可以正常工作,进行可以得到压力传感器测量出的食物的重量。而后进行中断优先级的初始化,本程序中主要用到了串口2的接收中断,所以只需要配置串口2的中断优先级。接着进行定时器3初始化,确保定时器3的通道1可以输出PWM波控制舵机旋转。舵机回归初始位置,能够使装置上电后,舵机回到初始位置。最后称取毛皮重量。判断串口是否接收到数据。若串口接收到数据,则进入串口中断,执行相应的程序。反之,则进行循环:称重—>给TLINK平台发送数据—>延时1秒。整体流程图如图所示。其次对使用ESP8266连接TLINK平台、控制舵机旋转、HX711模块得到重量的功能进行独立的分析。

2)ESP8266连接TLINK平台
此部分主要是通过串口发送AT指令给ESP8266,以实现ESP8266与TLINK平台的连接。主要流程为:串口与ESP8266连接、判断是否连接成功、发送指令将8266设置为STA模式、发送8266所要连接的WIFI名及密码、建立TCP连接、进入透传模式、发送设备的序列号、传输数据。具体流程图如图所示。

1.串口与ESP8266连接:串口的RX与ESP8266的TX相连,串口的TX与8266的RX相连。
2.判断是否连接成功:通过串口给ESP8266发送AT,如果连接成功ESP8266会返回“ok”,否则等待直到连接成功。程序如下:
- void checkESP8266(void)
{
memset(RXBuffer,0,RXBUFFER_LEN);//初始化接收BUF
sendString(USART2,"AT\r\n"); //串口发送AT指令,ESP8266收到该指令会回复“OK”
while(findStr(RXBuffer,"OK",500)==0)
{
sendString(USART2,"AT\r\n"); //未收到,重复发送
Delay_ms(500);
}
}
3.发送指令将8266设置为STA模式:通过串口发送AT指令:AT+CWMODE=1,即可将其设置为STA模式。部分程序如下:
memset(RXBuffer,0,RXBUFFER_LEN);
sendString(USART2,"AT+CWMODE?\r\n"); //发送AT指令,询问esp8266的模式
if(findStr(RXBuffer,"CWMODE:1",200)==0)
{
memset(RXBuffer,0,RXBUFFER_LEN);
sendString(USART2,"AT+CWMODE_CUR=1\r\n");//发送AT指令
if(findStr(RXBuffer,"OK",200)==0)
{
return 0;
}
}4.发送8266所要连接的WIFI名及密码:通过串口发送AT指令:AT+CWJAP=“所要连接的WIFI名”,“WIFI的密码”。程序如下:
void connectAP(u8* ssid,u8* pwd)
{
memset(TXBuffer,0,RXBUFFER_LEN);
memset(RXBuffer,0,RXBUFFER_LEN);
sprintf(TXBuffer,"AT+CWJAP_CUR=\"%s\",\"%s\"\r\n",ssid,pwd);//其中ssid、pwd均为宏定义,分别为wifi名称及密码
sendString(USART2,TXBuffer);
while(findStr(RXBuffer,"OK",800)==0)
{
sendString(USART2,TXBuffer);
Delay_ms(800);
}
}5. 建立TCP连接:通过串口发送AT指令:AT+CIPSTART=“TCP”,“TLINK的IP地址”,端口号。部分程序如下:
memset(RXBuffer,0,RXBUFFER_LEN);
memset(TXBuffer,0,RXBUFFER_LEN);
sendString(USART2,"+++");
Delay_ms(500);
sprintf(TXBuffer,"AT+CIPSTART=\"%s\",\"%s\",%d\r\n",mode,ip,port);
sendString(USART2,TXBuffer);
while(findStr(RXBuffer,"CONNECT",800)==0)
{
sendString(USART2,TXBuffer);
Delay_ms(800);
}6.进入透传模式:通过串口发送AT指令:AT+CIPMODE=1、AT+CIPSEND,即可进入透传模式。透传模式下,可以直接输送数据,无需使用AT+CIPSEND指令。部分程序如下:
memset(RXBuffer,0,RXBUFFER_LEN);
sendString(USART2,"AT+CIPMODE=1\r\n");
while(findStr(RXBuffer,"OK",300)==0)
{
sendString(USART2,"AT+CIPMODE=1\r\n");
Delay_ms(300);
}
memset(RXBuffer,0,RXBUFFER_LEN);
sendString(USART2,"AT+CIPSEND\r\n");7.发送设备的序列号:通过串口发送所要连接的设备的序列号,进行连接。每个设备的序列号是唯一的。程序如下:
void sendBuffertoServer(u8* buffer)
{
memset(RXBuffer,0,RXBUFFER_LEN);
sendString(USART2,buffer); //其中buffer为宏定义,为设备的序列号
}8.传输数据:通过串口发送想要发送的数据,数据的形式要按照自己定义的传输协议去写。程序如下:
void sendDeviceStatus(DeviceSta_Strcture * pdevsta)
{
char buffer[25] = {0};// 食物剩余量 投喂按钮 喂食状态
sprintf(buffer,"ZLJ:%d;%d;%d;#",pdevsta->Shengyu,pdevsta->Toushi,pdevsta->flag);
sendBuffertoServer(buffer);
}3)串口接收与发送数据本部分程序主要为串口初始化,以及串口中断函数的编写,主要实现Stm32通过串口2接收TLINK平台发送来的数据。当串口2接收到数据时,会进入串口2中断,运行串口中断内的程序。使用库函数编程,部分程序如下。
//串口2时钟使能:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB2Periph_USART2,ENABLE);
//串口2引脚配置:
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_2;//TX串口输出PA2
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3;//RX 串口输入PA3
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;//模拟输入
GPIO_Init(GPIOA,&GPIO_InitStructure); /*初始化GPIO*/
//串口2初始化设置:
USART_InitStructure.USART_BaudRate = 115200;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2, &USART_InitStructure);
USART_Cmd(USART2, ENABLE);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);
USART_ITConfig(USART2, USART_IT_IDLE, ENABLE);
//中断优先级配置:
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;//串口2中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);以上部分为串口2的初始化部分,在串口2接收到TLINK平台发来的数据后,进入串口中断,在串口中断中执行相应的程序,部分程序如下:
static u8 i = 0;
if(USART_GetITStatus(USART2, USART_IT_RXNE))
{
RXBuffer[i++] = USART_ReceiveData(USART2);
if(i==RXBUFFER_LEN)
{
i = RXBUFFER_LEN-1;
}
}
if(USART_GetITStatus(USART2, USART_IT_IDLE))
{
USART_ReceiveData(USART2);
i = 0;
processDeviceStatus(&device);
}4)采集重量信息本部分程序主要为通过HX711模块将压力传感器输出的模拟信号转换为Stm32可读的数字信号。本文中HX711模块输入通道使用A通道,增益为128。程序如下:
u32 HX711_Read(void)
{
unsigned long count;
unsigned char i;
HX711_DOUT=1;
Delay_us(1);
HX711_SCK=0;
count=0;
while(HX711_DOUT);
for(i=0;i<24;i++)
{
HX711_SCK=1;
count=count<<1;
Delay_us(1);
HX711_SCK=0;
if(HX711_DOUT)
count++;
Delay_us(1);
}
HX711_SCK=1;
count=count^0x800000;//第25个脉冲下降沿来时,转换数据
Delay_us(1);
HX711_SCK=0;
return(count);
}u32 HX711_Read(void)
{
unsigned long count;
unsigned char i;
HX711_DOUT=1;
Delay_us(1);
HX711_SCK=0;
count=0;
while(HX711_DOUT);
for(i=0;i<24;i++)
{
HX711_SCK=1;
count=count<<1;
Delay_us(1);
HX711_SCK=0;
if(HX711_DOUT)
count++;
Delay_us(1);
}
HX711_SCK=1;
count=count^0x800000;//第25个脉冲下降沿来时,转换数据
Delay_us(1);
HX711_SCK=0;
return(count);
}5)定时器输出PWM波本部分程序主要为定时器3通道1的初始化,并使用Stm32的固件库中函数TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1)输出PWM波,使舵机旋转。该函数有两个参数,第一个参数为定时器号,第二个参数为占空比的参数。部分程序如下。
//使能定时器3的时钟:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
//配置定时器3的引脚:
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出
GPIO_Init(GPIOC,&GPIO_InitStructure);
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3,ENABLE);
//初始化定时器3的基本配置:
TIM_TimeBaseInitStructure.TIM_Period=per; //自动装载值
TIM_TimeBaseInitStructure.TIM_Prescaler=psc; //分频系数
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
//初始化输出比较通道1:
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_Low;
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
TIM_OC1Init(TIM3,&TIM_OCInitStructure); //输出比较通道1初始化
//使能定时器3:
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3,ENABLE);//使能预装载寄存器
TIM_Cmd(TIM3,ENABLE); //使能定时器//使能定时器3的时钟:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
//配置定时器3的引脚:
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出
GPIO_Init(GPIOC,&GPIO_InitStructure);
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3,ENABLE);
//初始化定时器3的基本配置:
TIM_TimeBaseInitStructure.TIM_Period=per; //自动装载值
TIM_TimeBaseInitStructure.TIM_Prescaler=psc; //分频系数
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
//初始化输出比较通道1:
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_Low;
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
TIM_OC1Init(TIM3,&TIM_OCInitStructure); //输出比较通道1初始化
//使能定时器3:
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3,ENABLE);//使能预装载寄存器
TIM_Cmd(TIM3,ENABLE); //使能定时器以上部分为定时器3通道1的初始化部分,可以通过下面的setFEED()子函数控制舵机旋转合适的角度。
void setFEED(DeviceSta_Strcture * pdevsta)
{
u8 i;
if(Flag == 0 )
{
Flag = 1;//正转
for(i=0;i<3;i++)//喂食,旋转三次
{
TIM_SetCompare1(TIM3,FEED[i]);//FEED为数组,存放舵机的旋转角度
Delay_ms(1000);
}
}
else
{
Flag = 0;//反转
for(i=3;i<6;i++)
{
TIM_SetCompare1(TIM3,FEED[i]);
Delay_ms(1000);
}
}
pdevsta->flag = 0;
}void setFEED(DeviceSta_Strcture * pdevsta)
{
u8 i;
if(Flag == 0 )
{
Flag = 1;//正转
for(i=0;i<3;i++)//喂食,旋转三次
{
TIM_SetCompare1(TIM3,FEED[i]);//FEED为数组,存放舵机的旋转角度
Delay_ms(1000);
}
}
else
{
Flag = 0;//反转
for(i=3;i<6;i++)
{
TIM_SetCompare1(TIM3,FEED[i]);
Delay_ms(1000);
}
}
pdevsta->flag = 0;
}测试与总结
软硬件调试:
TLINK平台调试:TLINK平台的调试主要通过网络调试助手通过TCP连接,查看是否可与TLINK进行数据的交互,首先使用网络调试助手连接TLINK平台,连接成功后,通过网络调试助手向TLINK发送连接设备的唯一序列号,连接后,便可进行数据交互。结果如图所示:
STM32调试:STM32部分的调试则在Keil中使用Debug完成的,通过连接CMSIS-DAP无线仿真器进行在线的调试。可以查看STM32是否连接上ESP8266、是否可以连接上WiFi、是否连接到TLINK平台、是否可以与TLINK平台进行数据交互以及是否可以输出PWM波。
通过STM32向ESP8266发送AT,RXBuffer中接收到“OK”则表示二者连接成功。其中RXBuffer内为储存串口2接收到的数据信息。通过Dubeg将其添加到Watch1中进行数据查看,可以直观的观测到到串口接收到的数据信息,更加偏于进行STM32部分的软件调试。如图所示。

通过STM32向ESP8266发送所要连接的Wifi的名字及密码,RXBuffer中接收到“OK”则表示已经连接上WiFi。其中两个形参ssip、pwd分别表示为WiFi名、密码。如图所示。

通过STM32向ESP8266发送通信协议、TLINK平台的IP地址、端口号,发送完成后,延时0.5秒,再次发送设备的序列号进行连接,连接成功后,通过APP可以查看到设备显示“已连接”。结果图如图所示。

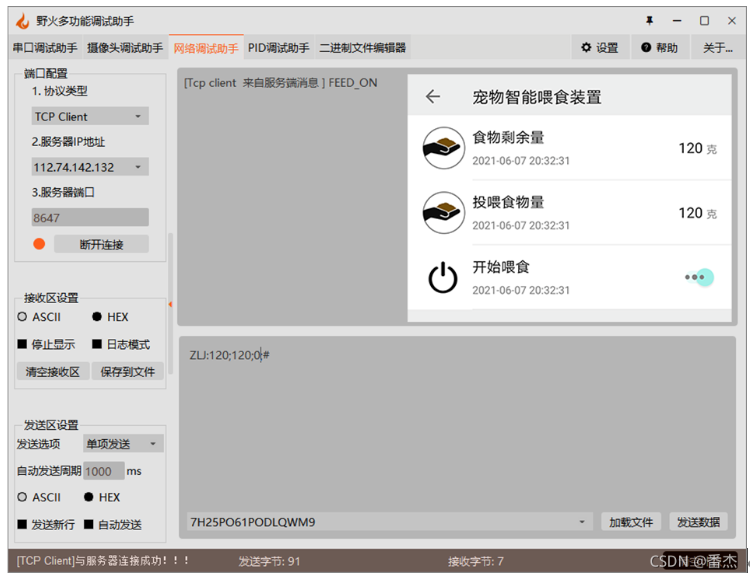
TLINK连接成功后,则可以进行数据的交互,可以通过TLINK平台向Stm32发送指令:“FEED_ON”表示开始喂食,“FEED_OFF”表示喂食停止。如图所示。

通过定时器3通道1输出周期为20ms,占空比为12.5%的PWM,即高电平时间为2.5ms。如图所示。

本次毕业设计还存在着一次缺陷,比如在3D打印的部分,由于3D打印机的精度不够高,导致打印出的成品,有些粗糙,会给压力传感器的测量带来问题,以后争取改进!
- void checkESP8266(void)
-


































