


项目分享| 单旋翼也能起飞的球型无人机
无人机只有1个桨叶也能飞起来,而且飞得还很平稳呢~
-
四旋翼无人机很常见,但只有一个旋翼的圆形无人机创意还不错,感兴趣的小伙伴,可以在下面链接查看更多信息:
https://makezine.com/projects/single-rotor-ball-drone-mk-ii/
作者:Benjamin Prescher
无人机只有1个桨叶也能飞起来,而且飞得还很平稳呢~

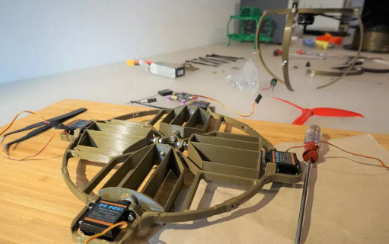
上面的无人机Ball Drone Project Mk II,与我们常见的多旋翼无人机不同,是一个完整的3D设计和打印的7英寸圆形单旋翼无人机,通过改变不同的气流通道,达到方向控制。

圆形无人机使用到的材料组件:
1)3D 打印部件,在thingiverse.com/thing:4635873免费下载 3D 文件。
2)电子调速器 (ESC),32 位,35A。使用了专为 FPV 无人机竞赛设计的 T-Motor F35A 3-6S BLHeli_32。
3)无刷电机,2700kV,Racerstar BR2306S。

4)螺旋桨叶,6 英寸,3 叶片顺时针。
5)遥控接收器,FlySky FS-A8S。

6)飞控,兼容 Betaflight,使用Diatone Mamba F405 MK2。
7)微型伺服电机 4个,Emax ES9051。
8)LED 灯条(可选),这里使用了一条 WS2812B RGB LED。
9)锂聚合物电池,1300mAh(3 芯)小巧轻便,使用了带有 XT60 连接器的 Tattu 11.1V电池。
10)XT60 插座或任何与电池匹配的插座
11)M3 硬件:10mm 螺钉 (10)、12mm 螺钉 (4)、螺母 (8) 和 15mm 垫片 (4)
12)电缆扎带
工具则有:
- 3D打印机
- 烙铁和焊料
- 螺丝刀/螺母起子
- 带有Betaflight Configurator 软件开源的计算机,来自 github.com/betaflight
下面就开始打造球型无人机:
1. 准备好零件
3D 打印的所有部件并整理好:

2.将舵机添加到下环
将每个伺服器安装在下环的支架中,使其旋转轴与无人机的中心对齐。
3. 使舵机居中
通过向每个伺服电机发送一个 1.5 毫秒的脉冲来对中每个伺服电机的转子位置。可以使用简单Arduino调用伺服库 ( arduino.cc/reference/en/libraries/servo ) 。一旦伺服器居中,安装随 ES9051 伺服电机提供的伺服摆臂。
4. 插入叶片和螺栓
伺服摇臂完全适合叶片翼上的配件。用M3×12mm螺丝在对面做了一个定位螺丝。

当所有 4 个机翼都安装好后,下环就准备好了,可以放在一边。
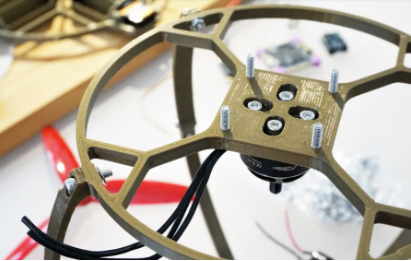
5.在上环上加电机
先安装无刷电机。从下方为飞行控制器添加螺钉,以便可以将飞行控制器向下推到螺纹上,然后使用 M3 电路板垫片将飞行控制器固定到位。
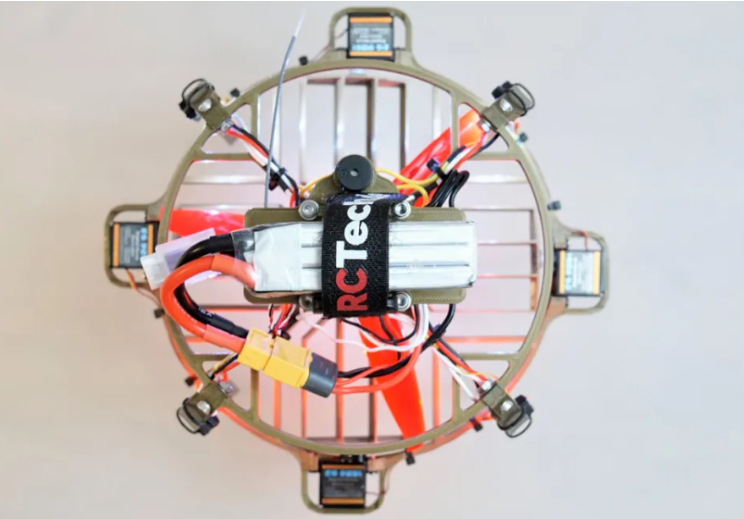
6. 连接电子设备

ESC 和 R/C 接收器安装到顶部。根据电池接口,还可以将“一个 XT60 插头焊接到 ESC 的电源上,以及为飞行控制器供电的两条小电缆。我在无人机腿内侧连接(菊花链)WS2812B 灯,并用它们连接伺服电源线。舵机的信号线必须延伸到无人机中间的飞控。
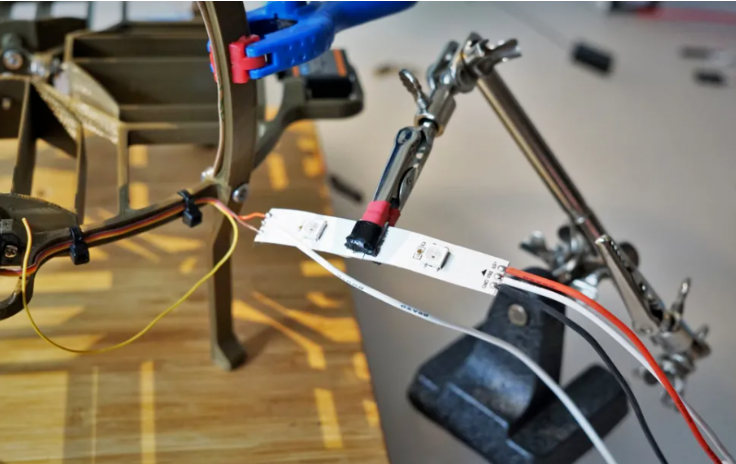

接下来,将 LED 灯条、电机和伺服线焊接到飞行控制器上。如果飞行控制器没有任何直接伺服输出,当然可以通过 Betaflight 中的“资源重新映射”将这些重新定位到当前电机连接。将所有电缆焊接到飞行控制器后,可以将电池座拧到垫片上,组装完成!

7.配置Betaflight固件
本次使用的是几乎所有人都可以免费访问的飞行控制器和软件。有很多开源项目,但 Betaflight 目前是竞赛无人机固件(github.com/betaflight/betaflight)。网上有很多教程和资源,这里就不多做解释了,玩过无人机的应该都知道Betaflight。我们需要知道的是:如何从四轮竞赛无人机变成单旋翼无人机?就是这样:
飞控资源配置:要控制这台单旋翼直升机,我们需要1只主电机和4只舵机来做动力和控制部分。大多数飞控可以控制4只电机,其中一些飞控带舵机控制接口,我们需要做的就是将舵机接口从新配置到BF的4个电机输出口上,在使用FURY F4飞控的配置中((github.com/betaflight/betaflight/tree/master/src/main/target/FURYF4)),可以看见哪些接口引脚可用,可以将LED输出接口配置为电机输出接口。PPM输入重新配置为电机的输出信息接口。
使用的 CLI 命令:
resource MOTOR 1 NONE
resource MOTOR 2 NONE
resource MOTOR 3 NONE
resource MOTOR 4 NONE
resource PPM1 NONE
resource SERVO 1 A03
resource SERVO 2 B01
resource SERVO 3 B00
resource SERVO 4 A02
resource MOTOR 1 C09
save
Mixer 配置:接下来,飞控必须向电机和舵机发送正确的信号。为此,您将调整混音器。在 Configuration 选项卡下,在 Mixer 部分选择 Custom Airplane。通过命令行处理:
# smix script for singlecopter on
MambaF405_MK2 (by Benjamin Prescher)
mixer CUSTOMAIRPLANE
# load a standard motor mix
mmix reset
mmix load airplane # Motor1 as ESC output
# mmix 0 1.000 0.000 0.000 0.000
# smix
smix reset
smix 0 3 0 100 0 0 100 0
smix 1 2 0 -100 0 0 100 0
smix 2 4 1 100 0 0 100 0
smix 3 5 1 -100 0 0 100 0
smix 4 3 2 50 0 0 100 0
smix 5 2 2 50 0 0 100 0
smix 6 4 2 50 0 0 100 0
smix 7 5 2 50 0 0 100 0
save如果想了解更多,可以查看Betaflight文档:github.com/martinbudden/betaflight/blob/master/docs/Mixer.md
8. 使用伺服 PID 稳定无人机
此无人机使用的舵机通常可以以servo_pwm_rate大约 333Hz 的频率运行(当然也有可以处理更多的舵机)。已将 servo_pwm_rate设置为 250Hz,相当于 PID 回路速率的四分之一。据了解 Betaflight 中的算法,只能以该速率的一小部分更新执行器的命令,那么人为设置高 PID 速率是没有意义的。
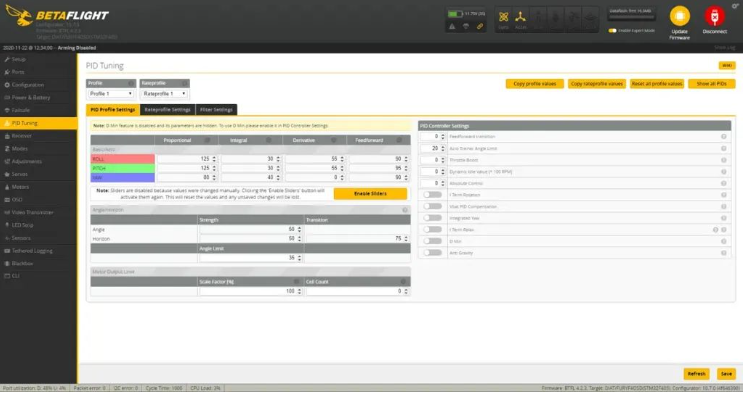
如果使用P值很大(如上图),就会使叶片伺服系统“抖动”。Betaflight 有一个很好的功能来解决这个问题——伺服低通滤波器。通过命令行处理:
set servo_lowpass_hz = 20set servo_pwm_rate = 250save起飞测试:
设置好无人机、连接所有设备并实施配置后,就可以进行测试。无人机应该表现如下:
- 发射器向右滚动——前后叶片向右移动
- 发射器向前俯仰- 左右叶片向前移动
- 发射器向右偏航——前叶片向左移动,右叶片向前移动,后叶片向右移动,左叶片向后移动

-























